1. Teori Dasar [Kembali]


Pada GA terdapat operator yang dapat dipakai yaitu persilangan dan mutasi.


Algoritma Genetika (GA) merupakan sebuah metode pencarian yang mengadopsi prinsip alamiah menjadi proses komputasi. Berikut istilah yang dipakai dalam GA


Pada GA terdapat operator yang dapat dipakai yaitu persilangan dan mutasi.
A. Persilangan
Persilangan memilih gen dari kromosom induk dan membuat anak baru. Secara sederhana ini dapat dilakukan dengan memilih titik persilangan acak. Seoerti pada gambar berikut

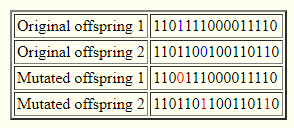
B. Mutasi
Mutasi dilakukan setelah persilangan dilakukan. Mutasi bertujuan mencegah nilai optimum lokal. Mutasi adalah mengganti secara acak anak baru. Dalam pengkodean biner Mutasi bisa dilakukan dengan mengganti bit bernilai 0 menjadi 1 atau sebaliknya. Seperti diilustrasikan dalam gambar berikut

2. Cara Menjalankan Koding [kembali]
Pada kesempatan ini saya akan melaporkan kembali tugas dari mahasiswa yang telah mengabil mata kuliah GA pada tahun sebelumnya. Adapun mahasiswa tersebut bernama Ahmad Fathan dengan alamat blog https://ahmadfathan162031.blogspot.com/2019/06/tugas-uts.html
Judul : Kendali Kecepatan Motor DC Menggunakan Sensor Jarak HCSR04 dengan Metode Kendali Fuzzy
Tujuan :
Mengendalikan robot agar dapat menelusuri ruangan (misalnya ruangan seperti Kontes Robot Pemadam Api Berkaki/Beroda Indonesia (KRPAI)) menggunakan data-data dari sensor-sensor.
Alat dan bahan :
a. Motor DC

b.Driver Motor L298N

c.Sensor Jarak HCSR04

d.Jumper

e.Mikrokontroller Arduino Nano

Cara Kerja :
Secara garis besar, sensor jarak disusun seperti gambar di bawah. Terdapat 3 buah sensor yang memberikan data kepada Mikrokontroller. Kemudian dari data tersebut diolah menggunakan metode Fuzzy oleh Mikrokontroller sehingga dapat mengendalikan kecepatan dari Motor DC melalui Motor Driver.


Parameter-parameter yang ditetapkan pada percobaan ini adalah sebagai berikut :
- Input
Pada percobaan kali ini, input yang digunakan adalah jarak yang berasal dari sensor jarak.
Beberapa variabel yang digunakan sebagai berikut.
Pada percobaan kali ini, input yang digunakan adalah jarak yang berasal dari sensor jarak.
Beberapa variabel yang digunakan sebagai berikut.
- Sedang : 20 cm sampai 60 cm
- Jauh : 40 cm sampai 80 cm
- Output
Output akan digunakan untuk mengontrol motor driver melalui PWM (pada Arduino Nano 10 bit - 0 sampai 255). Berikut ini nilai yang akan digunakan untuk percobaan kali ini.
- Lambat : 150 - 200
- Sedang : 175 - 225
- Cepat : 200 - 250

tampilan dari menu fuzzy

membuat input sebanyak 3 buah

terbentuk input 3 buah

membuat output 2 buah

terbentuk output 2 buah

pengaturan parameter input
Berikut Parameter-parameter yang akan digunakan:
Range : [0 80]
Untuk mf1:
- Name : Dekat
- Params : [0 20 40]
Untuk mf2:
- Name : Sedang
- Params : [20 40 60]
Untuk mf3:
- Name : Jauh
- Params : [40 60 80]
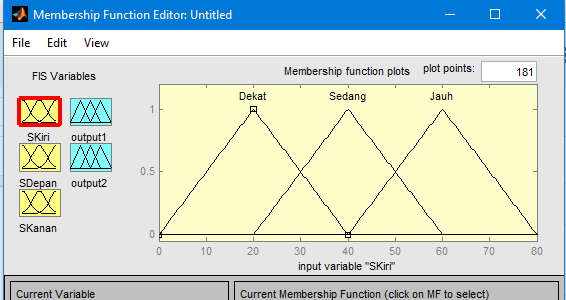
hasil input yang telah diletakkan parameter
Berikut Parameter-parameter yang akan digunakan:
Range : [150 250]
Untuk mf1:
- Name : Lambat
- Params : [150 175 200]
Untuk mf2:
- Name : Sedang
- Params : [175 200 225]
Untuk mf3:
- Name : Cepat
- Params : [200 225 250]
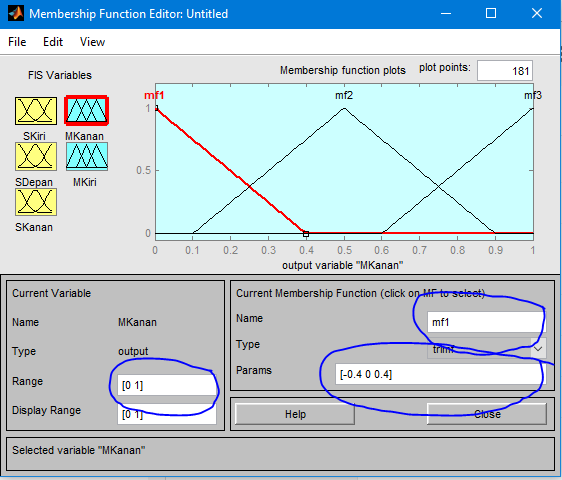
bagian yang perlu diubah

hasil output

aturan-aturan


hasil mapping
3. Video [kembali]
Download disini
Tidak ada komentar:
Posting Komentar